Devices
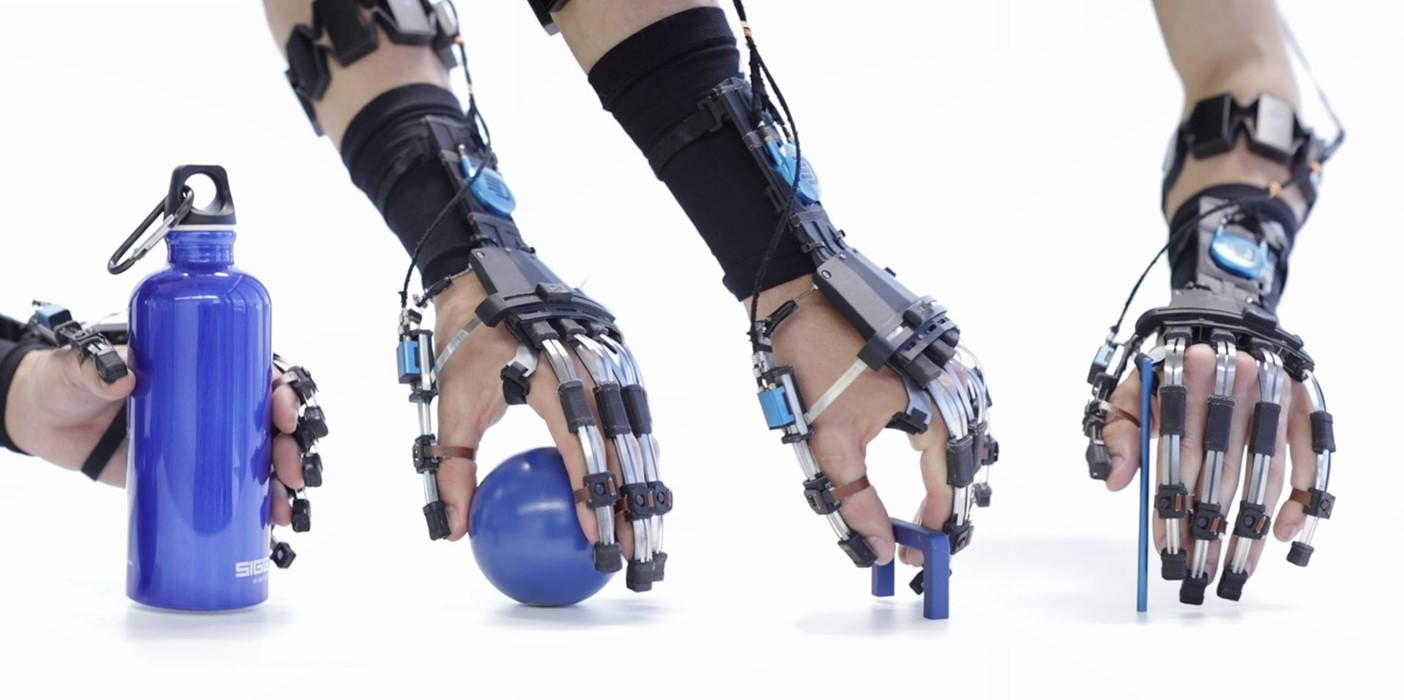
The RELab tenoexo is a lightweight, fully wearable robotic hand orthosis designed to support multiple grasp types. It can be tailored to incorporate different intention detection methods, physical attachment systems, and size.
The current prototypes, namely, the RELab tenoexo and PEXO, are fully wearable. They consist of a lightweight hand module weighing less than 150 grams and a back module containing motors, power sources, and controllers weighing 720 grams. This back module can be worn as a backpack or mounted on the backrest of a wheelchair.
The device features a remote actuation system and utilizes a compliant 3-layered sliding spring mechanism to ensure safe operation and adaptability to the shape of grasped objects. At the same time, the actuated thumb module is capable of both opposition and lateral grasps. Each finger can exert a maximum fingertip force of 5 N, enabling the grasping and lifting of most everyday objects, including 0.5-liter water bottles.
The device aims to assist individuals with sensorimotor hand impairment in various grasping tasks, both during therapy and daily activities like eating and grooming.
At the Future Health Technologies (FHT), the RELab tenoexo is being applied as an assistive device to support individuals after stroke with their activities of daily living. We work to evaluate the immediate functional benefits of using the RELab tenoexo with this population and further assess the feasibility of integrating the device within the home setting for daily usage.
Researchers involved:
For publications and more information, please visit RELab.

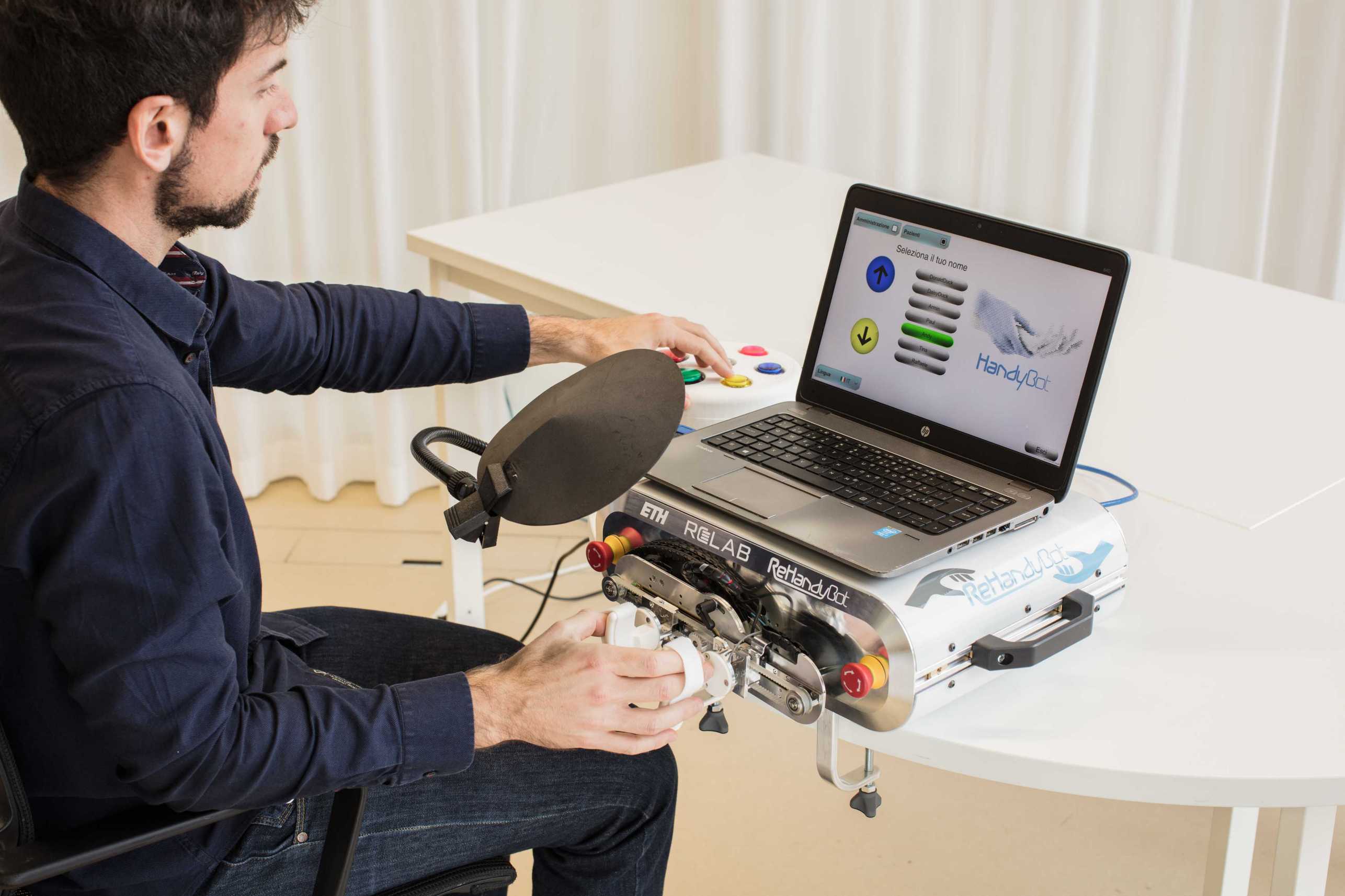
The ReHandyBot, developed by the Rehabilitation Engineering Laboratory, is a 2 degree-of-freedom, portable rehabilitation robot that trains grasping and forearm pronation/supination. ReHandyBot is embedded in a therapy platform that includes a neurocognitive therapy concept to assess and train motor and sensory functions with the difficulty level adapting depending on patients’ needs.
In previous studies with ReHandyBot and its predecessors in stroke survivors, it was shown that assessment-driven robot-assisted therapy leads to non-inferior recovery compared to dose-matched conventional care. A recent feasibility study showed that minimally supervised therapy with the robot is possible.
We aim to further promote access to therapy and to increase therapy dose along the continuum of care by bringing robot-aided rehabilitation to patients’ homes.
At Future Health Technologies, the ReHandyBot is part of the series of three devices (with MyoGuide and H-Man by Articares Pte. Ltd.) used in the RehabGym study. The study is conducted in collaboration with ETH Zurich, Nanyang Technological University and Tan Tock Seng Hospital to investigate the feasibility of self-administered, home-based stroke rehabilitation.
Researchers involved:
For publications and more information, please visit RELab.

The Virtual Peg Insertion Test (VPIT) is an assessment tool for arm and hand impairments, consisting of a computer and a haptic device. The task is to insert 9 virtual pegs into virtual holes as accurately and quickly as possible. The virtual pick-and-place task is controlled via the handle of the haptic device, which has 3 integrated force sensors.
The device is inspired by the well-known nine-hole peg test used in conventional assessment. A major drawback of the conventional assessment is that it requires fine-grained movements for pinching the pegs, thus excluding severely to moderately impaired subjects. The VPIT provides a handle that is easily grasped, allowing the inclusion of moderately impaired subjects. Furthermore, the VPIT provides valuable kinetic and kinematic descriptions of the movement performed, in addition to the time needed to complete the assessment.
The VPIT measures the position of the hand throughout the task, as well as the grip force of the hand. 10 performance metrics were chosen, due to their validity, reliability, and sensitivity, measuring the user’s arm performance. These metrics can be interpreted as a representation of movement efficiency (deviation from shortest path or endpoint error of the movement), movement quality (change in acceleration, energy induced by jerk), movement speed, and grip force coordination (number of sub-movements, force build-up).
Validation studies of the device (clinical feasibility) and its metrics have been successfully performed in post-stroke individuals, persons with multiple sclerosis, and Autosomal Recessive Spastic Ataxia of Charlevoix–Saguenay patients.
At Future Health Technologies, the VPIT is one of the assessments selected for a 3-year longitudinal study tracking upper limb post-stroke recovery. Using a combination of kinetic, kinematic, and clinical data, the study attempts to capture the evolution of movement quality, and develop prognosis models for post-stroke upper limb recovery. This study is a collaboration between ETH Zurich, Tan Tock Seng Hospital, and Nanyang Technological University.
Researcher(s) involved:
For publications and more information, please visit RELab.
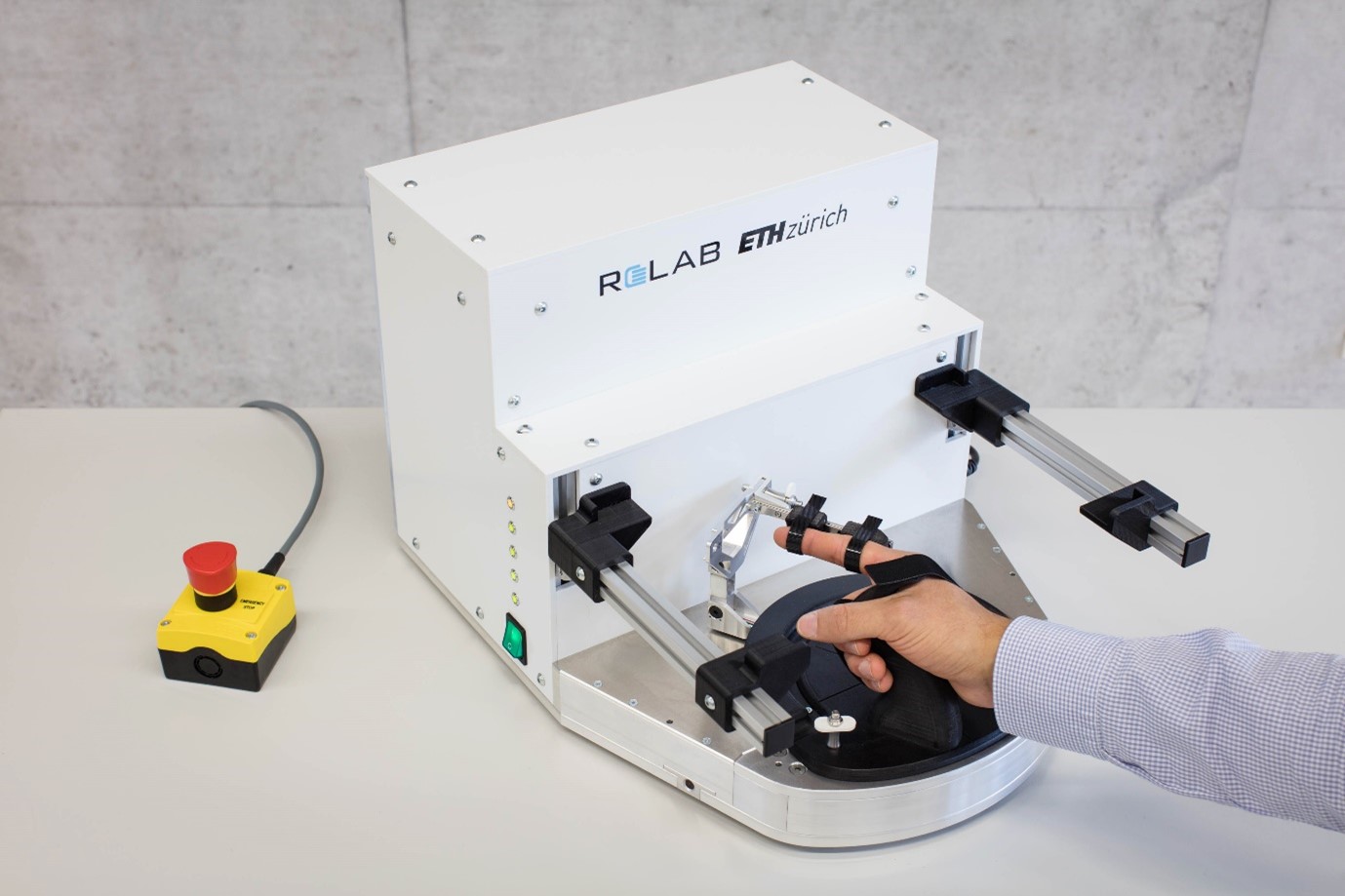
The ETH MIKE (Motor Impairment and Kinaesthetic Evaluation) is an assessment and rehabilitation tool targeting the sensorimotor functions of the index finger.
Somatosensory functions are often affected after neurological injuries. In fact, there is very limited focus on somatosensory functions during rehabilitation. These functions are rarely assessed in clinics, and existing clinical assessments do not sensitively capture somatosensory impairments. The ETH MIKE solves this by providing objective and sensitive assessments for both the proprioception and motor functions of the hand. It especially measures the understudied evolution of hand proprioception functions, but also their interaction with motor functions, providing new insights into neurological recovery.
The robot focuses solely on the index finger to keep the design simple and to minimize its size and cost for clinical applications. Furthermore, the index finger is involved in many fine movement tasks (e.g., pinching) and often drives the movement of the hand. Studies have shown correlations in the impairments of adjacent body parts, as well as between the ETH MIKE metrics and the Box and Block Test.
The one-degree-of-freedom end-effector robot specifically targets the MCP (metacarpophalangeal) joint, providing objective and sensitive measurements of the position, velocity, and force exerted by the index finger. This is done through an assessment which consists of 5 tasks:
- 3 tasks assessing active and passive motor functions, i.e. active and passive range of motion; maximal fingertip force in extension and flexion; and the maximal velocity of the index finger.
- 1 passive task assessing proprioception impairments of the finger, where the user indicates the perceived position of their index finger on the screen which conceals their finger. The error between the perceived and actual positions is measured.
- 1 active task assessing sensorimotor functions of the finger, where the user actively moves their finger to match the movement of the target displayed on the screen that conceals their finger. The positional error between the moving target and finger is measured throughout the entire length of the assessment.
Validation studies of the device and its metrics have been successfully performed in post-stroke individuals, persons with multiple sclerosis, and children with unilateral palsy.
At Future Health Technologies, the ETH MIKE is one of the assessments selected for a 3-year longitudinal study tracking upper limb post-stroke recovery. Using a combination of kinetic and clinical data, we aim to capture the importance of post-stroke proprioception impairments, as well as the interaction between upper limb proprioception and motor recovery, and develop prognosis models for post-stroke upper limb recovery. The study is a collaboration between ETH Zurich, Tan Tock Seng Hospital, and Nanyang Technological University.
Researcher(s) involved:
For publications and more information, please visit RELab.

The MyoGuide is a mobile training application designed specifically for progressive wrist extension training. Using the Myo armband to capture the surface electromyography (sEMG), the application records the minimum voluntary efforts of stroke patients, even if they do not exhibit full active movement. This functionality offers opportunity for training in patients with a wide range of impairment levels, from minor to severe.
With only an armband and tablet, the MyoGuide offers unparalleled portability and accessibility. This is especially crucial for stroke patients as it allows the continuation of rehabilitation outside the clinic for better recovery.
At Future Health Technologies, the MyoGuide is part of the series of three devices (with ReHandyBot and H-Man by Articares Pte. Ltd.) used in the RehabGym study. The study is conducted in collaboration with ETH Zurich, Nanyang Technological University and Tan Tock Seng Hospital to investigate the feasibility of self-administered, home-based stroke rehabilitation.
Researchers involved:
Publications:
- A Usability Study on Mobile EMG-Guided Neurofeedback Training for Individuals With Stroke – MyoPanda
Hao-Ping Lin, Xue Zhang, Yang Xu, Daniel Woolley, Lina Zhao, Weidi Liang, Hsiao-ju Cheng, Lixin Zhang, Nicole Wenderoth
Late Breaking Research Poster 2229349, Volume 104, Issue 3, E9, March 2023
DOI: external page 10.1016/j.ampr.2022.12.02